Solidworks Simulation - 接触

Solidworks Simulation - 接触
执笔装配体之间的连接关系
- Solidworks simulation中定义装配体零件之间的连接关系的主要形式有接触和接头
接触形式
无穿透
- 可防止两实体间昌盛干涉,但允许接触表面产生滑移或形成接触面分离
- 此类接触形式包括齿轮啮合、鼠标移动、车辆在地面上移动
- 算法:罚函数法
结合
- 两个物体粘合为一个整体
- 机械行业中该类接触形式最典型的应用:焊接问题、塑料件熔融问题
- 在部分特殊情况下,也可将一些非关键位置的无穿透接触形式简化为结合
- 算法:约束方程/节点
允许贯穿(空闲)
- 为节省计算时间或满足某些特定场合需要,允许零件之间产生干涉
- 现实中不存在这种接触形式
冷缩配合
- 主要针对过盈配合问题
- 应为过盈会导致面于面之间产生干涉,使用该接触形式可计算干涉产生的过盈量所导致的接触变形问题

- 需要设置过盈量
虚拟壁
- 定义实体与目标基准面之间的接触
各模块允许的接触形式
| 接触形式 | 无穿透 | 结合 | 允许贯穿 | 冷缩配合 | 虚拟壁 |
|---|---|---|---|---|---|
| 静应力 | √ | √ | √ | √ | √ |
| 频率 | × | √ | √ | × | × |
| 屈曲 | × | √ | √ | × | × |
| 非线性 | √ | √ | √ | × | × |
| 跌落 | √ | √ | √ | × | × |
| 线性动力 | × | √ | √ | × | × |
- 允许贯穿属于比较特殊的接触形式,在绝大多数情况不会使用
- 冷缩配合和虚拟壁本质上也是无穿透,只是所使用的环境较为特殊
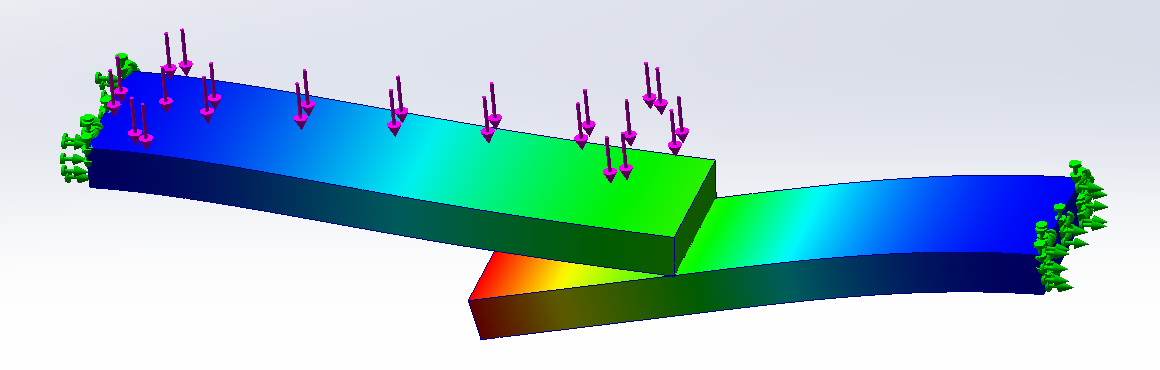
螺栓的连接类型
刚性
- 螺栓接头应用刚性杆元件将螺栓和螺母压印区域与代表螺栓柄的横梁单元连接,此时采用刚性连接会在所连接零部件的螺栓头和螺母区域产生较为严重的应力奇异
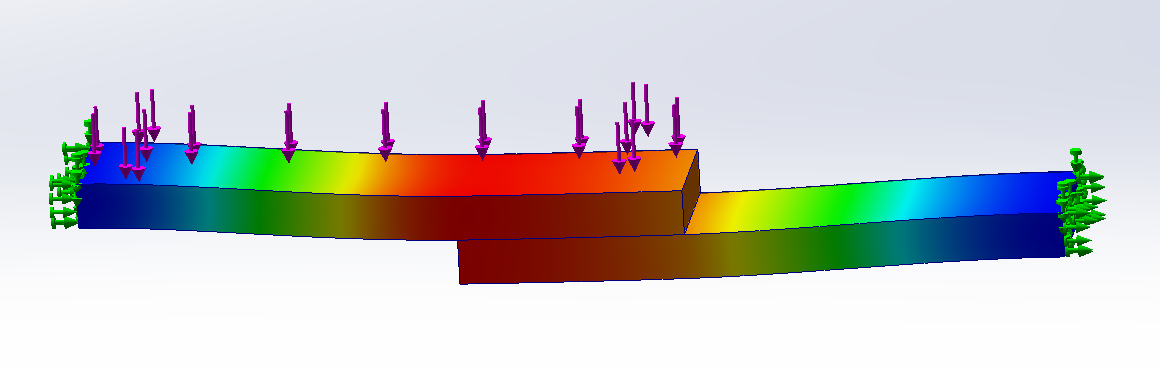
分布式
- 分布式连接将在螺栓头和螺母接触区域内产生相对真实的应力和位移场,分布式连接并不能完全消除应力奇异
- 在条件允许的情况下,尽可能的使用分布式连接类型
轴承约束和轴承接头的区别
- 连结下的轴承是部件和部件间的连接关系,与轴相连的部件也参与计算
- 夹具下的轴承夹具是单个零件的约束状态,与轴相连的部件在分析中不会参与计算,只会保证轴端部只能旋转不能产生其他方向的偏移
远程载荷/质量
- 将复杂的物体简化为质量点加载在需要关注的结构上,可大大降低计算量
结果属性
| 结果类型 | 结果属性 |
|---|---|
| 合位移 | 标量 |
| X,Y,Z位移 | 矢量 |
| von Mises应力 | 标量 |
| 法向应力 | 矢量 |
| 主应力 | 标量 |
| 抗剪应力 | 矢量 |
| 应力强度 | 标量 |
- 标量不会随着坐标系的改变而改变数值
- 向量(矢量)会随着坐标系的改变而发生变化
坐标系
| 坐标系 | 说明 |
|---|---|
| 笛卡尔坐标系 | 坐标轴为X(红)、Y(绿)、Z(蓝) |
| 圆柱坐标系 | 坐标轴为径向r(红)、圆周t(绿)、轴向z(蓝) |
| 球坐标系 | 坐标轴为径向r(红)、经度t(绿)、纬度p(蓝) |
螺栓预紧力
- 在一般的计算中,不添加预紧力可以给实际设计留出一定的安全空间,但是对于预紧力过大的的产品设计,在仿真中忽略预紧力会导致较大误差
预紧力设置方法
- 当产品设计中的螺栓预紧力较小时,仿真中可不添加预紧力
- 当产品设计中的螺栓预紧力较大时,必须按照一定的设计规则进行添加预紧力
紧密配合设置
- 螺纹连接位置使用紧密配合设置更接近实际产品状态
刚性体和弹性体
刚性体
- 刚度无穷大,无论载荷多大都不会发生变形
- 理论力学研究的是刚性体运动问题
- 是一种理想状态,现实中并不存在
- 当一些零件是否变形对计算结果影响很小,仅仅是负责传递力,则可以将这部分零件设置为刚性体
弹性体
- 受力后会产生变形
- 材料力学研究的是弹性体变形问题
- 有限元分析中,大多数情况都是研究弹性体问题
刚体运动
- 是指模型中的某个部件甚至模型整体可以在不发生变形的情况下移动,也就是运动
产生刚体运动的几种潜在可能
- 缺少固定约束
- 遗漏接触或者接触设置错误
- 三维模型本身的间隙
- 原因:初始间隙导致零部件间需要通过运动才能进行力的传递,但是零件一旦发生运动就不满足静力学分析,因此模型就出出现刚体运动问题或者计算报错
- 网格划分产生的间隙
- 数值算法产生的微小力
- 软弹簧,最不推荐的方法,软弹簧是指刚度极小的弹簧,其作用是抵消由数值算法产生的微小力
- 在接触面设置摩擦系数,此方法会大幅度增加计算量和计算时间,但是多数情况下可以使用
- 强制位移约束,此方法可以使用的情况较少
- 对称面约束,此方法对模型有一定的要求
实体焊接
- 有限元焊接问题解决方案:
- 直接绑定法(solidworks simulation中为结合)
- 梁单元法
- 真是模型分析
接触优先级问题
| 接触类型 | 设置1 | 设置2 | 设置3 | 设置4 | 设置5 | 设置6 |
|---|---|---|---|---|---|---|
| 相触面组 | 无穿透 | 无穿透 | 结合 | 允许贯穿 | 允许贯穿 | 允许贯穿 |
| 零部件 | 结合 | 允许贯穿 | 无穿透 | 无穿透 | 无穿透 | 结合 |
| 全局 | 允许贯穿 | 结合 | 允许贯穿 | 允许贯穿 | 结合 | 结合 |
| 最终接触形式 | 无穿透 | 无穿透 | 结合 | 无穿透 | 无穿透 | 允许贯穿 |
- 当相触面组设置为无穿透和结合时,模型接触形式显示为相触面组的接触形式
- 当相触面组设置为允许贯穿时,如零部件接触和全局接触存在无穿透设置,则模型接触形式为无穿透;如果零部件接触和全局接触里不存咋无穿透设置,则模型接触形式为允许贯穿
喜欢这篇文章的人也看了






评论
匿名评论隐私政策
✅ 你无需删除空行,直接评论以获取最佳展示效果